
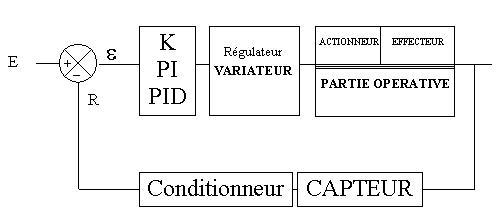
2-1 Structure générale d?une chaîne de régulation
En régulation on boucle le système ce qui permet de prendre en compte les variations qui apparaîssent en sortie du système.
|
Fonctions de transfert |
|
2-2 Correcteurs
Il existe trois types de correcteurs :
2-3 Structure typique
un système est caractérisé par sa :
| Rapidité | Précision | Stabilité |
Il existe deux temps dans l'évolution d?un signal.
3-1 Rapidité
 |
|
C'est le régime transitoire qui caractérise la rapidité du système.
3-2 Précision : écart statique

3-3 Stabilité
 |
 |
 |
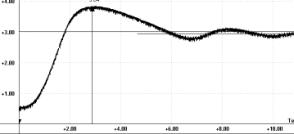
3-4 signal recherché
L'oscillation du signal doit être au maximum de ± 5% de la valeur finale.

4-1 Correcteur proportionnel
K= 1.11 |
K = 5 |
 |
 |
Le régulateur reçoit une grandeur réglante plus importante car multipliée
par le gain,
Le 1ier dépassement augmente avec le gain.
L'erreur statique diminue avec le gain.
L'oscillation apparaît.
Plus le gain augmente, plus l'erreur statique est faible mais on risque une oscillation .
