Schéma de principe |
|
 |
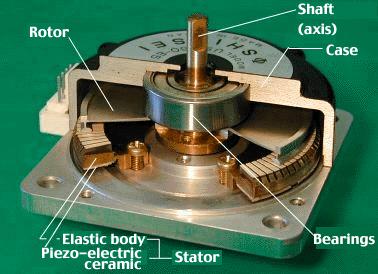
Un moteur piézoélectrique est formé d'un :
Des tensions alternatives hautes fréquences (environ 40 kHz)
sont appliquées sur les céramiques qui se déforment et
induisent des vibrations dans le stator. |